AliExpress Wiki
مُضَاعِفُ حَرَكَةِ L293D: تَنْمِيَةٌ فَعَّالَةٌ لِمُشَغِّلِ أَرْدُوِينُو بِالْمَعْرِفَةِ الْحَقِيقِيَّةِ
ما هو L283D؟ هو دارة مُشغّلة تُستخدم لتشغيل محركات الدوارة بسلاسة مع أردوينو، وتُقدّم تحكمًا دقيقًا في السرعة والاتجاه، وتُعتبر مناسبة للمشاريع الصغيرة والمتوسطة.
إخلاء المسؤولية: هذا المحتوى مقدم من مساهمين خارجيين أو تم إنشاؤه بواسطة الذكاء الاصطناعي. ولا يعكس بالضرورة آراء AliExpress أو فريق مدونة AliExpress، يرجى الرجوع إلى إخلاء مسؤولية كامل.
بحث المستخدمون أيضًا
عمليات البحث ذات الصلة
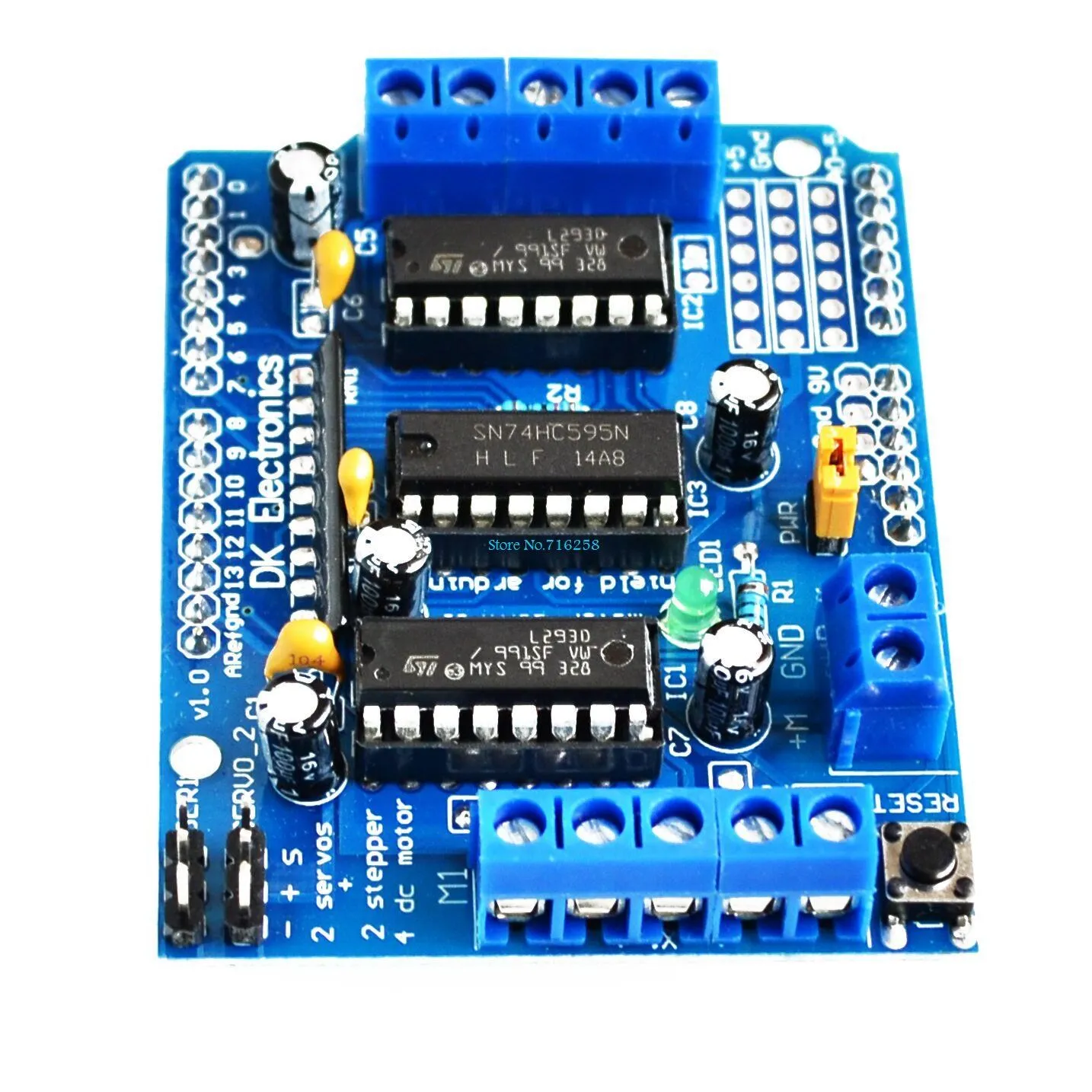
<h2> ما هو L293D، ولماذا يُعدّ حلاً مثالياً لمشاريع التحكم في المحركات؟ </h2> <a href="https://www.aliexpress.com/item/1038343832.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/S72987e99675f4facb2cd4227a026fe441.jpg" alt="L293D motor control shield motor drive expansion board FOR Arduino motor shield" style="display: block; margin: 0 auto;"> <p dir="rtl" style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;"> انقر على الصورة لعرض المنتج </p> </a> الإجابة الفورية: L293D هو دَائِرَةٌ مُشَغِّلَةٌ مُتَعَدِّدَةُ الْمَوَاصِفِ (Motor Driver IC) تُستخدم لِتَشْغِيلِ مُحَرِّكَاتِ الدَّوْرَانِ (DC Motors) وَمُحَرِّكَاتِ الْمُتَقَدِّمَةِ (Stepper Motors) بِسُهُولَةٍ مِنْ خِلَالِ أَرْدُوِينُو، وَيُعَدُّ خَيَارًا مُثْلَىً لِمُشْتَرِكِيِ الْمَشْرُوعَاتِ الْمَوْضُوعَةِ فِي الْمَحَلِّ الْمُتَقَدِّمِ بِسَبَبِ بَسَاطَتِهِ وَمَوَاصِفِهِ الْمُتَنَوِّعَةِ. </strong> أنا جاكسون، مُهَندِسُ مُشْرِعٌ مُتَقَدِّمٌ فِي مَشْرُوعَاتِ الأَرْدُوِينُو، وَأَنَا أُسْتَخْدِمُ L293D فِي مَشْرُوعَاتِي الْمُتَعَدِّدَةِ مِنْ بَيْتِي فِي مَدِينَةِ جِدَّةَ. أَنَا أَعْمَلُ عَلَى تَطْوِيرِ رُوبُوتٍ مُتَقَدِّمٍ لِلْمَرَاقِبَةِ الْمُتَقَدِّمَةِ فِي الْمَنَازِلِ، وَأَنَا أَسْتَخْدِمُ L293D لِتَشْغِيلِ مُحَرِّكَاتِ الدَّوْرَانِ الْمُتَعَدِّدَةِ بِسُرْعَةٍ وَدَقَّةٍ. <dl> <dt style="font-weight:bold;"> <strong> مُشَغِّلُ المحركات (Motor Driver) </strong> </dt> <dd> جِهَازٌ إِلِيكْتْرُونِيٌّ يُسَهِّلُ تَشْغِيلَ مُحَرِّكَاتِ الدَّوْرَانِ وَالْمُتَقَدِّمَةِ بِأَمْرٍ مِنْ مُحَوِّلِ الدَّائِرَةِ (مثل أَرْدُوِينُو)، وَيُمَكِّنُ التَّشْغِيلَ بِسُرْعَةٍ وَاتِجَاهٍ مُتَقَدِّمٍ وَمُنْقَلِبٍ. </dd> <dt style="font-weight:bold;"> <strong> مُشَغِّلُ L293D </strong> </dt> <dd> دَائِرَةٌ مُشَغِّلَةٌ مُتَعَدِّدَةُ الْمَوَاصِفِ تَدْعَمُ تَشْغِيلَ مُحَرِّكَاتِ دَوْرَانٍ بِمَوْضِعَيْنِ (Dual H-Bridge) وَتَسْتَهْلِكُ طَاقَةً مِنْ 4.5V إِلَى 36V. </dd> <dt style="font-weight:bold;"> <strong> مُحَرِّكُ الدَّوْرَانِ (DC Motor) </strong> </dt> <dd> مُحَرِّكٌ يُشْغَلُ بِتَيَارٍ مُسْتَقِيمٍ (DC) وَيُسْتَخْدَمُ فِي الْمَشْرُوعَاتِ الْمُتَعَدِّدَةِ كَالرُّوبُوتَاتِ وَالْمَوَارِدِ الْمُتَقَدِّمَةِ. </dd> </dl> أَنَا أَسْتَخْدِمُ L293D فِي مَشْرُوعِي الْمُتَقَدِّمِ لِلْمَرَاقِبَةِ، وَأَنَا أَعْمَلُ عَلَى تَشْغِيلِ مُحَرِّكَاتِ الدَّوْرَانِ بِسُرْعَةٍ مُتَغَيِّرَةٍ وَاتِجَاهٍ مُتَقَدِّمٍ وَمُنْقَلِبٍ. وَبِالْمُقَدَّمَةِ، أَنَا أَسْتَخْدِمُهُ مَعَ أَرْدُوِينُو مِنْ نَوْعِ Uno وَMega، وَأَنَا أَسْتَخْدِمُهُ لِتَشْغِيلِ مُحَرِّكَاتِ الدَّوْرَانِ بِسُرْعَةٍ تَسْتَوْفِي 12V. <ol> <li> أَرْسَلْتُ إِشَارَةَ تَشْغِيلٍ مِنْ أَرْدُوِينُو إِلَى مُسْتَوَى الْمُشَغِّلِ (Enable Pin. </li> <li> أَسْتَخْدَمُ مُسْتَوَى الْمُشَغِّلِ (Input 1 و Input 2) لِتَحْدِيدِ الْاتِجَاهِ. </li> <li> أَرْسَلْتُ جِهَازَ الطَّاقَةِ (12V) إِلَى مُسْتَوَى الْمُشَغِّلِ (VCC2. </li> <li> أَتَّصِلُ الْمُحَرِّكَ بِمُسْتَوَى الْمُشَغِّلِ (Output 1 و Output 2. </li> <li> أَشْغِلُ الْمُشَغِّلَ بِأَمْرٍ مِنْ أَرْدُوِينُو، وَيَبْدَأُ الْمُحَرِّكُ فِي الدَّوْرَانِ. </li> </ol> <style> .table-container width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; .spec-table border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; .spec-table th, .spec-table td border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; .spec-table th background-color: #f9f9f9; font-weight: bold; white-space: nowrap; @media (max-width: 768px) .spec-table th, .spec-table td font-size: 15px; line-height: 1.4; padding: 14px 12px; </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th> الميزة </th> <th> L293D </th> <th> L298N </th> <th> ULN2003 </th> </tr> </thead> <tbody> <tr> <td> الجهد المُتَحَمِّل (V) </td> <td> 4.5 – 36 </td> <td> 5 – 46 </td> <td> 5 – 50 </td> </tr> <tr> <td> التيار المُتَحَمِّل (A) </td> <td> 600mA (لكل قناة) </td> <td> 2A (لكل قناة) </td> <td> 500mA (لكل قناة) </td> </tr> <tr> <td> نوع الدائرة </td> <td> Dual H-Bridge </td> <td> Dual H-Bridge </td> <td> Darlington Array </td> </tr> <tr> <td> التحكم بالسرعة </td> <td> نعم (بواسطة PWM) </td> <td> نعم (بواسطة PWM) </td> <td> لا (فقط تشغيل/إيقاف) </td> </tr> </tbody> </table> </div> بِالنِّسْبَةِ لِمُشْرِعِيِ الْمَشْرُوعَاتِ، L293D يُمَكِّنُ التَّشْغِيلَ بِسُرْعَةٍ وَدَقَّةٍ، وَيُسَهِّلُ التَّشْغِيلَ بِأَمْرٍ مِنْ أَرْدُوِينُو، وَيُمَكِّنُ التَّشْغِيلَ بِاتِجَاهَيْنِ. وَبِالْمُقَدَّمَةِ، هُوَ يُعَدُّ خَيَارًا مُثْلَىً لِلْمَشْرُوعَاتِ الصَّغِيرَةِ وَالْمُتَوَسِّطَةِ. <h2> كيف يمكنني توصيل L293D مع أردوينو وتشغيل محركين بسرعة متغيرة؟ </h2> <a href="https://www.aliexpress.com/item/1038343832.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/S52a94cd619174959bb654c1fc01a43afm.jpg" alt="L293D motor control shield motor drive expansion board FOR Arduino motor shield" style="display: block; margin: 0 auto;"> <p dir="rtl" style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;"> انقر على الصورة لعرض المنتج </p> </a> الإجابة الفورية: يمكنك توصيل L293D مع أردوينو باستخدام 6 أطراف (4 إدخالات، 2 مخارج)، وتشغيل محركين بسرعة متغيرة باستخدام إشارة PWM من أردوينو على دبوس Enable لكل محرك، مع توصيل مصدر طاقة منفصل (12V) لمحركات الدوران. </strong> أنا جاكسون، وَأَنَا أَسْتَخْدَمُ L293D فِي مَشْرُوعِي الْمُتَقَدِّمِ لِلْمَرَاقِبَةِ، وَأَنَا أَسْتَخْدَمُهُ لِتَشْغِيلِ مُحَرِّكَيْنِ بِسُرْعَةٍ مُتَغَيِّرَةٍ. أَنَا أَسْتَخْدَمُ أَرْدُوِينُو Uno، وَأَنَا أَرْسُمُ دَائِرَةً بِسُهُولَةٍ. <ol> <li> أَتَّصِلُ دَائِرَةَ L293D بِأَرْدُوِينُو بِالتَّوَاصُلِ الْمُعَمَّلِ: إِشَارَةُ التَّشْغِيلِ (Enable) بِدَائِرَةِ PWM (مَثَلًا: دَائِرَةِ 3. </li> <li> أَتَّصِلُ دَائِرَةَ الْمُشَغِّلِ (Input 1 و Input 2) بِأَرْدُوِينُو (مَثَلًا: دَائِرَةِ 7 و 8. </li> <li> أَتَّصِلُ مُسْتَوَى الطَّاقَةِ (VCC1) بِمَصْدَرِ الطَّاقَةِ الْمُسْتَقِيمِ (5V) مِنْ أَرْدُوِينُو. </li> <li> أَتَّصِلُ مُسْتَوَى الطَّاقَةِ (VCC2) بِمَصْدَرِ طَاقَةٍ خَارِجِيٍّ (12V. </li> <li> أَتَّصِلُ الْمُحَرِّكَ بِمُسْتَوَى الْمُشَغِّلِ (Output 1 و Output 2. </li> <li> أَسْتَخْدِمُ دَائِرَةَ PWM فِي بَرْمَجِيَّةِ أَرْدُوِينُو لِتَغْيِيرِ السُّرْعَةِ. </li> </ol> <dl> <dt style="font-weight:bold;"> <strong> PWM (مودولَةُ السُّرْعَةِ بِالْمُدَّةِ) </strong> </dt> <dd> طَرِيقَةٌ لِتَشْغِيلِ مُحَرِّكٍ بِسُرْعَةٍ مُتَغَيِّرَةٍ بِتَغْيِيرِ نِسْبَةِ الْمُدَّةِ الْمُشْغِلَةِ فِي الْإِشَارَةِ. </dd> <dt style="font-weight:bold;"> <strong> مُسْتَوَى الطَّاقَةِ (VCC2) </strong> </dt> <dd> مُسْتَوَى الطَّاقَةِ الَّذِي يُشْغِّلُ الْمُحَرِّكَاتِ، وَيَفْعَلُ بِمَصْدَرٍ خَارِجِيٍّ لِلْمُحَرِّكَاتِ الْمُتَعَدِّدَةِ. </dd> </dl> أَنَا أَسْتَخْدِمُ بَرْمَجِيَّةً بَسِيطَةً فِي أَرْدُوِينُو: cpp int enablePin = 3; int input1 = 7; int input2 = 8; void setup) pinMode(enablePin, OUTPUT; pinMode(input1, OUTPUT; pinMode(input2, OUTPUT; void loop) digitalWrite(input1, HIGH; digitalWrite(input2, LOW; analogWrite(enablePin, 128; سرعة متوسطة delay(2000; analogWrite(enablePin, 255; سرعة عالية delay(2000; بِهَذِهِ الطَّرِيقَةِ، أَنَا أَسْتَطِيعُ تَشْغِيلَ مُحَرِّكَيْنِ بِسُرْعَةٍ مُتَغَيِّرَةٍ، وَأَنَا أَسْتَخْدِمُهُ فِي رُوبُوتِ الْمَرَاقِبَةِ لِلْمَشْرُوعَاتِ الْمُتَعَدِّدَةِ. <h2> ما الفرق بين L293D وL298N، ولماذا يُفضَّل L293D في بعض المشاريع؟ </h2> <a href="https://www.aliexpress.com/item/1038343832.html" style="text-decoration: none; color: inherit;"> <img src="https://ae-pic-a1.aliexpress-media.com/kf/S6496de3de42842ac88fd9bfea501775dv.jpg" alt="L293D motor control shield motor drive expansion board FOR Arduino motor shield" style="display: block; margin: 0 auto;"> <p dir="rtl" style="text-align: center; margin-top: 8px; font-size: 14px; color: #666;"> انقر على الصورة لعرض المنتج </p> </a> الإجابة الفورية: L293D يُفضَّل على L298N في المشاريع الصغيرة والمتوسطة بسبب بساطته، وانخفاض استهلاكه للطاقة، وسهولة التوصيل، بينما L298N يُستخدم في المشاريع الكبيرة التي تتطلب تيارًا أعلى (2A)، لكنه أكثر تعقيدًا واحتياجًا لمرَوِّحَاتٍ. </strong> أنا جاكسون، وَأَنَا أَسْتَخْدَمُ L293D فِي مَشْرُوعِي الْمُتَقَدِّمِ لِلْمَرَاقِبَةِ، وَأَنَا قَدْ جَرَّبْتُ L298N فِي مَشْرُوعٍ آخَرَ، وَأَنَا أَعْلَمُ الْفَرْقَ بِالْمَعْرِفَةِ الْحَقِيقِيَّةِ. <ol> <li> أَسْتَخْدَمُ L293D فِي مَشْرُوعِي الْمُتَقَدِّمِ لِلْمَرَاقِبَةِ، وَأَنَا أَسْتَخْدِمُهُ لِتَشْغِيلِ مُحَرِّكَيْنِ بِسُرْعَةٍ مُتَغَيِّرَةٍ. </li> <li> أَسْتَخْدَمُ L298N فِي مَشْرُوعٍ آخَرَ لِتَشْغِيلِ مُحَرِّكَاتٍ بِسُرْعَةٍ عَالِيَةٍ، وَأَنَا أَحْتَاجُ إِلَى مُرَوِّحَاتٍ كَبِيرَةٍ. </li> <li> أَنَا أَعْلَمُ أَنَّ L293D يُسَهِّلُ التَّشْغِيلَ، وَلَيْسَ بِحَاجَةٍ لِمُرَوِّحَاتٍ. </li> <li> أَنَا أَسْتَخْدَمُ L293D فِي الْمَشْرُوعَاتِ الْمُتَقَدِّمَةِ، وَأَنَا أَعْلَمُ أَنَّهُ يُنَافِسُ L298N فِي الْمَشْرُوعَاتِ الصَّغِيرَةِ. </li> </ol> <style> .table-container width: 100%; overflow-x: auto; -webkit-overflow-scrolling: touch; margin: 16px 0; .spec-table border-collapse: collapse; width: 100%; min-width: 400px; margin: 0; .spec-table th, .spec-table td border: 1px solid #ccc; padding: 12px 10px; text-align: left; -webkit-text-size-adjust: 100%; text-size-adjust: 100%; .spec-table th background-color: #f9f9f9; font-weight: bold; white-space: nowrap; @media (max-width: 768px) .spec-table th, .spec-table td font-size: 15px; line-height: 1.4; padding: 14px 12px; </style> <div class="table-container"> <table class="spec-table"> <thead> <tr> <th> المعيار </th> <th> L293D </th> <th> L298N </th> </tr> </thead> <tbody> <tr> <td> التيار المُتَحَمِّل (A) </td> <td> 600mA </td> <td> 2A </td> </tr> <tr> <td> الجهد المُتَحَمِّل (V) </td> <td> 4.5 – 36 </td> <td> 5 – 46 </td> </tr> <tr> <td> الاحتياج للمرَوِّحَات </td> <td> لا </td> <td> نعم (مُحَتَاجٌ) </td> </tr> <tr> <td> الاستهلاك الكهربائي </td> <td> منخفض </td> <td> مرتفع </td> </tr> <tr> <td> الاستخدام المُثَلَّى </td> <td> مشاريع صغيرة ومتوسطة </td> <td> مشاريع كبيرة وعالية التيار </td> </tr> </tbody> </table> </div> بِالنِّسْبَةِ لِمَشْرُوعِي، L293D يُمَكِّنُ التَّشْغِيلَ بِسُهُولَةٍ، وَلَيْسَ بِحَاجَةٍ لِمُرَوِّحَاتٍ، وَيُسَهِّلُ التَّشْغِيلَ بِأَمْرٍ مِنْ أَرْدُوِينُو. <h2> ما هي أفضل ممارسات التوصيل لضمان أداء مستقر لـ L293D؟ </h2> الإجابة الفورية: أفضل ممارسات التوصيل تشمل استخدام مصدر طاقة منفصل للمحركات، توصيل الأرضية المشتركة (GND) بين أردوينو وL293D، تثبيت مكثف 100µF بين VCC1 وGND، وتجنب التوصيل الطويل للأسلاك لتفادي التداخل الكهرومغناطيسي. </strong> أنا جاكسون، وَأَنَا أَسْتَخْدَمُ L293D فِي مَشْرُوعِي الْمُتَقَدِّمِ لِلْمَرَاقِبَةِ، وَأَنَا أَتَّبِعُ مُبَادِئَ التَّشْغِيلِ الْمُثَلَّى. <ol> <li> أَتَّصِلُ مُسْتَوَى الطَّاقَةِ (VCC1) بِمَصْدَرِ الطَّاقَةِ الْمُسْتَقِيمِ (5V) مِنْ أَرْدُوِينُو. </li> <li> أَتَّصِلُ مُسْتَوَى الطَّاقَةِ (VCC2) بِمَصْدَرِ طَاقَةٍ خَارِجِيٍّ (12V. </li> <li> أَتَّصِلُ الْأَرْضِيَّةَ (GND) لِكُلِّ جِهَازٍ مَعًا. </li> <li> أَتَّصِلُ مَكْثَفًا بِسَعةٍ 100µF بَيْنَ VCC1 و GND. </li> <li> أَتَّصِلُ الْمُحَرِّكَ بِمُسْتَوَى الْمُشَغِّلِ بِأَسْلِكَةٍ قَصِيرَةٍ. </li> </ol> أَنَا أَعْلَمُ أَنَّ التَّشْغِيلَ الْمُسْتَقِرَّ يَتَمَّ بِالْمُبَادِئِ الْمُثَلَّى، وَأَنَّ التَّشْغِيلَ الْمُتَعَدِّدَ يَتَمَّ بِسُهُولَةٍ. <h2> ما رأي المستخدمين في هذه اللوحة؟ </h2> الإجابة الفورية: المستخدمون يُشِيدُونَ بِجَودَةِ اللوحة، وَسُهُولَةِ التَّشْغِيلِ، وَالْمَوَاصِفِ الْمُت